
Введение в ТАУ
Начинаем разбираться с теорией автоматического управления
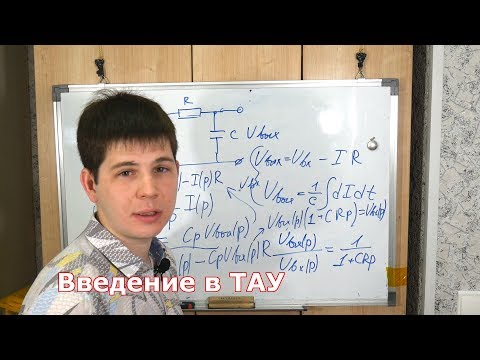

Начнем с общих определений и пары типовых звеньев — апериодического первого и второго порядков, интегрального и дифференциального.
Начнем с общих определений и пары типовых звеньев — апериодического первого и второго порядков, интегрального и дифференциального.
8 комментариев
Чего так – в наше время практически от каждого разработчика ожидается способность фулл-стак разработки, не редко разработчик под проект нанимается вообще один, а осваивать чуваку отдельную софтину да матановые методы только для подбора настроек шаговику, когда в параллели еще нужно сделать многослойную платку да прошиву под FPGA/MCU – это пипец. Тем более что реально применить их понадобится может быть раза два-три за жизнь.
Офкорс, есть мега-корпорации, делающие роботизированный станок стоимостью 100 млн баксов для какой-нибудь линии обработки кремниевых вейферов при производстве процессоров, где реально может быть нанят сугубо отдельный чувак работой которого будет чисто подобрать параметры для электромеханики…
Однако вероятность простому эмбеддеру попасть на такую позицию стремится примерно к нулю — это область уже других спецов, имеющих большее отношение к механике и динамике, нежели к электронике.
-Стивен Хокинг, из книжки Краткая история времени.
Например по ТАУ и как там все более-менее работает, это нужно для того, чтобы в принципе понимать как управлять механизком и изменение тех же параметров ПИД регулятора отразится на его работе.
Тем более что я буду в дальнейшем рассказывать о многоконтурных системах, которые буду банально собирать в симуляторе и заливать эту модель сразу в устройство. Просто так параметры регулятора, а их три — не подберешь. Там придется последовательно приближаться к этому результату. Я даже больше скажу — в реальной системе в принципе проблематично расчитать регулятор правильно с первого раза и настройка идет вручную. Вся проблема — в параметрах реальной системы. Расчитать их невозможно, измерить некоторые — проблематично. Но когда например ты знаешь, что тот или иной параметр регулятора обратно пропорционален такой-то величине, настройка идет бодрее:)
Да и не собираюсь я углубляться в матан. Автонастройку еще никто не отменял, а я расскажу как этим пользоваться.
Так себя ведет регулятор на ПЛК 150 в помещении ~250 кубов воздуха с воздушным нагревателем 6кВт. Чуть подробнее
Причем работает не только с пропорциональным регулированием но и позиционным (дискретные ступени мощности), и более того (всё тотже алгоритм) нивелирует задержки на включение например дизельной горелки.
Как показывает мой опыт, большинство проблем связано с тем, что ПИД не умеют готовить — то интегратору дают вылазить за выходные приделы, то неправильно интегрируют или дифференцируют, то вообще подсовывают ему не лианеризированную систему и что-то от него хотят.
Вообщем, что ПИД что нейросети имеют право на жизнь, везде свое применение.
Почитал про SMC, какраз наш регулятор решенный матаном, забавно :)
На коптере кстати тоже работает, правда пока не летает полноценно, не могу побороть китайские датчики, горизонт убегает.