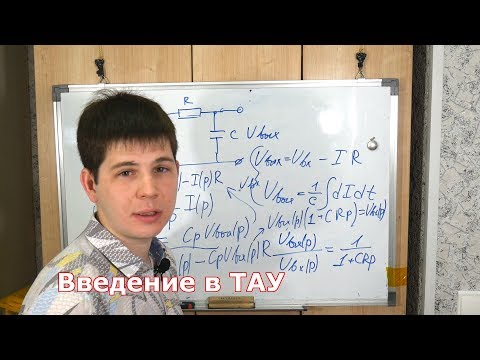
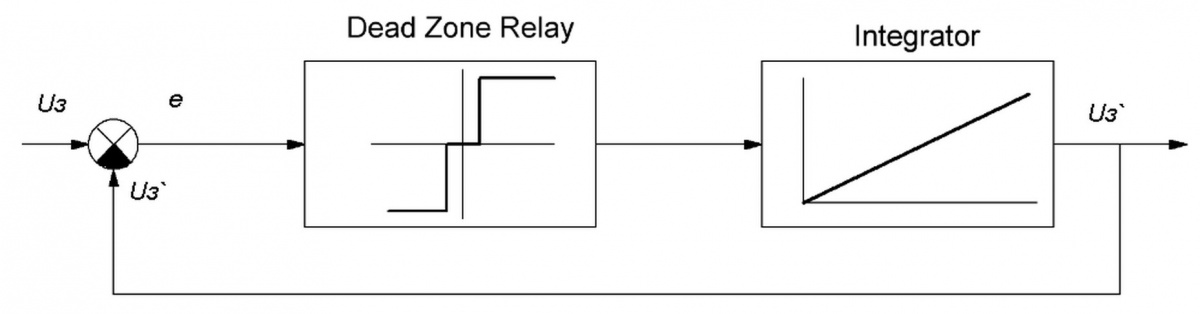
ПИД-регулятор и его звенья
Жесткий матан в виде диффуров, модульных и симметричных оптимумов, амплитудно и фазочастотных характеристик и т.д. — ждите в отдельных роликах с названием «как настроить тот или иной регулятор» и иже с ними. Для начала поиграемся с отдельными звеньями ПИД-регулятора.


Конкурс — Разыгрываем набор Arduino «Матрешка Х», подробности подкатом:
Читать дальше
Конкурс — Разыгрываем набор Arduino «Матрешка Х», подробности подкатом:
Читать дальше